Semi-Autonomous Manipulation of Natural Objects
 |
Effective deployment of robots in search and rescue
missions will enable faster and safer removal of debris and
other hazardous material. As a result, additional lives will
be saved, the number and severity of injuries will decrease,
and significant damage to infrastructure will be avoided. Already today robots are an integral part of many search and rescue units. These robots typically serve as either mobile cameras (autonomy in navigation, but no manipulation capabilities) or as tools controlled by a human operator (no autonomy, but capable of interacting with the environment). |
I developed perceptual and manipulation capabilities that enable a robot to share a role with a human operator: the robot provides the operator with processed visual information and a set of possible actions, and the human operator chooses the strategy of interacting with the environment.
- The robot's perceptual capabilities include a novel scene segmentation algorithm based on 3D data, and tools to analyze the segments to determine possible interactions with objects
- The robot's manipulation and grasping capabilities are based on a library of compliant controllers
- The human-robot interaction is achieved with a graphical user interface
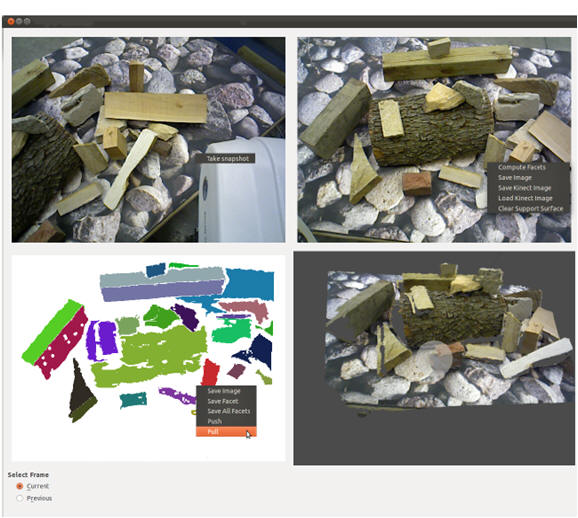 |
The graphical user interface enabling role-sharing between
the robot and a human operator.
|